
雷诺士工业型UPS在汽车焊接机器人中的抗“晃电”应用
传统的手工焊接存在着劳动量大、人力成本高、工作环境恶劣的影响,焊接精度受劳动者素质影响、效率低下等缺点,已不能满足现代高技术产品的质量、产量要求。因此,保证焊接产品质量的稳定性、提高生产率和改善劳动条件已成为现代焊接制造工艺发展亟待解决的问题,由此工业制造领域的焊接机器人应运而生。目前,工业制造领域中应用最广泛的机器人是焊接机器人,特别是在汽车制造业中,机器人使用量约占全部工业机器人总量的30%,而其中的焊接机器人数量就占去60%左右。汽车焊接机器人在工作中的生产工艺复杂,设备联锁众多,各种检测信号相互影响。如果生产线上的任何一台机器人出现电气故障停机,将影响整个生产线的运行。
2015年,某著名汽车制造厂,在其刚刚开工的焊装分厂,生产线上的焊接机器人故障频发。分析其原因是:进口原厂的工业机器人生产商在成套时,在控制器的输入端前加配的稳压电源,不能解决几十台焊接机器人同时工作时,因其伺服电机数量众多造成的电压暂降即“晃电”。
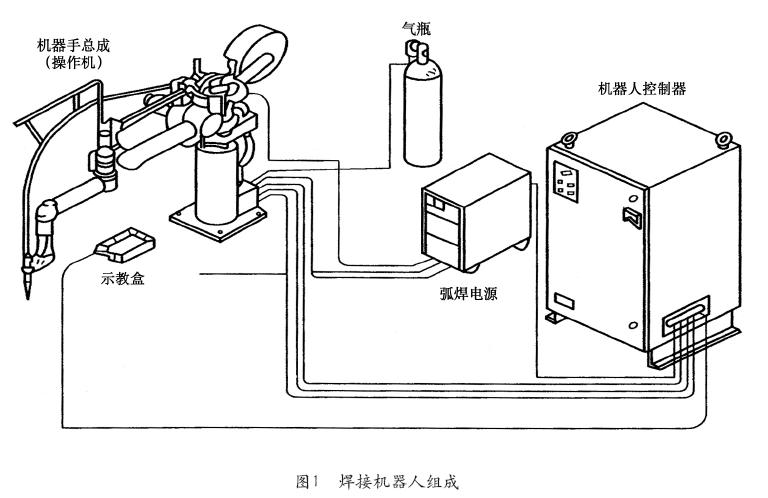
图1中,工业机器人控制器的主要任务是控制机器人在工作空间中的运动位置、姿态和轨迹、操作顺序及动作的时间等。机器人自由度的高低取决于其可移动的关节数目,关节数愈多,自由度越高,位移精准度也愈出色,所须使用的伺服电机数量就相对较多;换言之,愈精密的工业型机器人,其内的伺服电机数量愈多。伺服电机的分类大致有以下三种:
①液压和气压驱动:响应速度慢、精度低,伴随着焊接机器人伺服驱动系统对响应速度、控制精度要求的提高,液压和气压驱动正逐步退出市场;
②直流电机伺服:直流伺服具有精度高、控制系统简单等优点,是当前伺服系统的主流。但是存在电刷机械换向机构,换向时的打火现象可能对工作现场的安全造成危害,同时机械换向机构易磨损,不利于伺服系统的持续可靠工作,且维护困难;
③交流永磁同步电机伺服:质量功率比小,无机械换向机构,易维护,但控制系统较为复杂,不易实现高精度控制。随着技术发展,交流同步电机逐步具备了宽调速范围、高稳速精度、快速动态响应及四象限运行等良好的技术性能,正逐步取代直流电机。
每台多轴机器人由一套控制系统控制,这也意味着控制器性能要求较高。一旦控制器因为电力问题(断电、浪涌、过、低压等)发生误动作、宕机、甚至引发数据丢失,将引发重大事故。在分析控制器的输入端前加配的稳压电源故障后,发现造成稳压电源98%的故障即不能正常工作,是因为电压暂降即“晃电”引起的,稳压电源的配置有天生缺陷,应选用工业型UPS。
我们知道无论供电局花多少代价来改善电网,但是还是无法避免电压暂降或暂升、电压浪涌、谐波*、频率漂移、瞬态尖峰/高压、市电断电等电力品质问题的发生,给电力用户带来不良影响。这是由于在电网上有大量的负载,它们的一些工作状态和故障状态、及自然灾害等,都会影响电网的安全可靠性。如:闪电暴雨、大风下雪、建筑施工中起重机和挖掘机人员误操作、动物触线、其它大电机启动、短路故障、线路切换配电装置故障等。
据统计表明,电压暂降幅值多为额定值的70%~90%(剩余电压值),典型持续时间为10ms~1s,每个用户一年所遭遇的暂降次数从十几次到数百次不等。在各类电能质量问题中,造成用电设备异常运行或停机的绝大部分因素是电压暂降问题。根据EPRI统计,超过90%的电能质量事件均为电压暂降。电压暂降具有发生频度高、事故原因不易察觉的特点。
1 “晃电”的概念
电压暂降(Voltage
Sag;Voltage
Dip)俗称“晃电”,是指供电电压有效值在短时间内突然大幅下降又恢复正常的突发事件。电压暂降在国内也称为电压骤降、电压跌落、电压瞬间波动、电压凹陷等。多数为电网因雷击、短路、大负载起动等情况引起,供电电源电压大幅度下跌或电压短时中断数秒,致使用电设备不能正常工作。描述电压暂降常采用暂降幅值、持续时间和发生频次三大特征量,有时还要考虑相位的突变。国际电气与电子工程师协会(IEEE)将电压暂降定义为供电电压有效值快速下降到额定值的90%~10%,然后回升至正常值附近;而国际电工委员会(IEC)则将其定义为下降到额定值的90%~1%,持续时间为10ms~1min。
2 “晃电”的危害
电动机的运行大多数采用交流接触器、软起动器和变频器等起动控制设备进行控制。“晃电”时交流接触器会释放,软起动器和变频器也会停机,因此在工业生产中常常会因“晃电”引起许多重要的低压电机停机。而关键机组停机又会导致大机组、甚至会导致整个生产装置连锁停机,最终导致连续生产过程被迫中断,生产装置被迫紧急停止运行,从而给企业造成巨大的经济损失,有时还会引起火灾、爆炸等恶性事故发生。图2给出“晃电”产生的原因、影响和后果。

我们依据用户需求,采用一体化解决方案,解决了原有分体式解决方案中不同国家设备的不同电压等级、不同频率等级以及不受UPS主机监控的问题,不仅缩小了占地面积,提高了可用性,而且也为用户节约了成本。通过对现场的负载分析以及现场环境的勘察,坚持“高度工程组件化”的方法,顺应“工业4.0”的潮流,发扬“工匠精神”的态度,攻关克难,重新设计与调整UPS系统中部分组件的电气参数,按时为用户提供“量身定制”化的解决方案。该解决方案具有稳定性强、高可靠性、扩容性强等诸多优势。满足了用户防护等级、系统架构简单、操作简便、系统可靠性等特殊要求,保证UPS在现场供电系统断电情况下,能够持续地为其提供高可靠UPS电源。
用工业型UPS替换进口原厂机器人稳压电源后,两年来运行良好,从未发生紧急报修的情况,备受用户赞誉。
3 工频工业型UPS解决方案的特点
(1)高度工程组件化系统解决方案
(2)安全可靠性
系统安全可靠运行是每一个工业系统最根本的要求,而对电源(后备电源或保安电源)系统安全可靠性更是系统的命脉,对自动化程度很高的工业设备来说,电源系统运行的安全可靠性尤为重要。遵照以上原则,在初步设计中,系统装置选用工业型UPS系统,保证了部件的安全可靠性,在机柜的设计上,充分考虑了机柜的接地、通风、防潮等设计,使整个系统可靠性在硬件上得到大大提高。UPS在软件上采用结构化、模块化设计,增强了系统的分级容错设计,防止系统进入被动性失控状态,加强了故障检测报警及应急处理功能,提高了系统的安全性。
(3)实时性
工业型UPS核心控制芯片采用原装进口的高性能数字信号处理器及分散控制系统,相对于传统的采用微处理器构成的设备,UPS输出电压的质量更高,动态性能更好,实时性更佳,拥有更迅速的突发性事件处理能力,因此,更为适应恶劣的电网环境,整机的可靠性有了质的提高。
(4)易操作性
系统的人机操作设计充分考虑其方便、美观、实用,用户接口及界面设计充分考虑人体结构特征及视觉特征进行优化设计;界面美观大方,操作简便实用的LCD液晶显示界面采用全汉化显示。
(5)易维护性
工业型UPS采用可插拔模块设计,提高系统维护和故障检测的速度,缩短了系统的平均维护时间(MTTR<0.5hour)。
(6)先进性
在满足整体运行要求及安全可靠的前提下,系统的主设备选型符合计算机技术及电力电子技术的发展趋势,可以保证在今后相当长的一段时间内不需要更新换代,以便将来实现系统平滑升级和扩展的要求。
(7)开放性
系统主设备的选用考虑了与计算机监控系统的组网,监控系统具有良好的硬件和软件接入功能,硬件和软件均具有良好的开放性,保证了电源系统与其他系统的互连性、系统扩展性。
(8)抗*性
本电源系统主设备外部接口设计采用了专用的抗静电、抗高压脉冲串、抗雷击设计,电气设备全部可靠接地,软件采取了自诊断措施,采用超隔离技术等,有效地防止电磁波、*电和静电等*侵入电源系统主设备内部,以免造成系统设备的损坏和误动作。
4 结束语
今后机器人数字化工厂是真正意义上将机器人、智能设备和信息技术三者在制造业的完美融合,涵盖了制造的生产、质量、物流等环节,主要解决工厂、车间和生产线以及数字化工厂采用智能化无人车间环节,主要解决工厂、车间和生产线以及产品的设计到制造实现的转化过程,是智能制造的典型代表。机器人数字化工厂代表了全球最先进的制造模式,这种模式已在汽车制造、航空航天、造船以及电子等行业得到应用,是未来制造业发展的趋势。但是,占全部机器人数量60%左右的焊接机器人,在今后相当一个时期,其电压暂降即“晃电”的问题,还是要工业型UPS来完全解决。
- 上一篇:蓄电池保养的三个小技巧 2017/11/8
- 下一篇:迎接智能配网时代配电设备数字化升级势在必行 2017/10/20